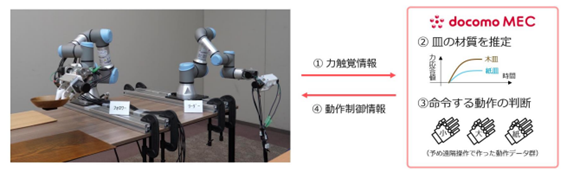
NTTドコモと慶應義塾大学は、同大が開発したロボット制御技術「リアルハプティクス®」を活用し、力加減を適切に操作できる半自律型ロボットハンド・アームの無線自律制御に成功した。5Gとネットワークコンピューティング(MEC)を組み合わせた、力触覚情報のリアルタイム分析は日本初だという。

両者は力触覚情報にそれぞれを組み合わせた自律制御システムを開発した。アームによる材質判別は力触覚情報から判別しているため、表面と中身の弾力感が異なるような視覚で判別が難しい物を適切な力加減で持ち上げ選別することを可能にする。
ドコモと慶應大は「リアルハプティクスをはじめとするロボット制御技術と、さらなる低遅延通信技術を組み合わせ、無線で制御される半自律型ロボットを実現し、さまざまな分野におけるロボット活用の社会実装を目指す」としている。