芝浦工業大学の飯塚浩二郎教授らの研究チームは、無人惑星探査車を支える土台の形状の変化からスリップ状態を検知する新しいシステムを開発した。これは探査車操作の安全性と効率を高める可能性が示されている。
研究チームは土台の変形から探査車の走行状態を検知するシステムを開発した。研究ではひずみとして現れるシャーシの形状変化を、ひずみの変異と振動変化の2つに分類した。
解析により、探査機の進行方向に働く力がひずみによって変化することが明らかになっている。そのため、ひずみの変異をモニタリングすることで力の変化を検出することができる。
さらに、ひずみの振動変化率が探査化の滑りの程度とその後の走行状態の変化を効果的に測定できることを発見した。このデータを使用することでシステムは探査機の状態をリアルタイムに判断することができるとしている。
研究グループは「岩や医師など環境障害物を検出する能力もシステムに組み込まれており、探査機操作の安全性と効率を高める可能性が示されている」と説明している。
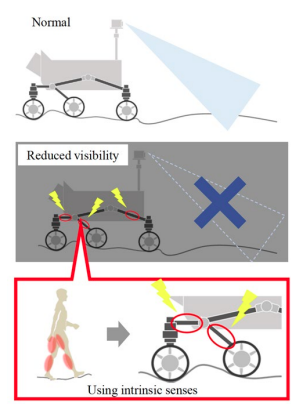
筋肉が身体の走行状態を検知するのと同
様に、ローバーのスリップ状態はシャー
シの変形を検知することで判断できる
(提供:飯塚教授)