東京⼯科⼤学コンピュータサイエンス学部の⻲⽥弘之教授らの研究グループは、⼈間の視覚機序に基づいた動体検知機能により⾼齢者の⾒守りなどに活⽤できるデバイスを開発した。12⽉にオープンした在宅医療・介護の推進拠点「三鷹市福祉Laboどんぐり⼭」(東京都三鷹市)との共同実証研究を開始した。
◇研究背景と⽬的は?
⻲⽥研究室(思考と⾔語)では、少⼦⾼齢社会が進む時代で、⼈と共⽣するサービスロボットが重要であると考え実⽤化に向けた研究を⾏っている。今回の共同研究はこれまでの基礎研究の⼀環として実施するもの。実証研究では、同施設内の協⼒者を対象に寝室、浴室、トイレなどにおける⾼齢者の危険予知や事故検知といった、同デバイスの利⽤場⾯や⽅法などの応⽤について検証する。今年度末を⽬処に報告をまとめ、学会などで発表する計画。
◇どんな研究内容を行うの?
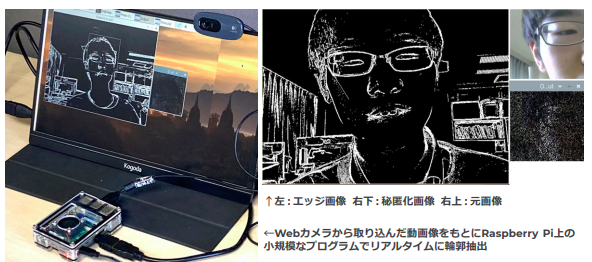
開発したデバイスは、⼩型コンピュータ「ラズベリーパイ」を⽤いて⼈の⽬の網膜を模した動体検知機構を実装した⼩型カメラ⼀体型の装置で、照明機器などに装着が可能。Webカメラの映像データを暗号化しデバイス内で処理しテキスト情報として出⼒するため、被介護者らのプライバシーを保護しながら⾒守りに必要な判断(ベッドからの落下危険性、浴室等での事故、動かないなど異常検出等)を⾏うことができる。また⼈⼯知能など⼤掛かりなシステムを使わず少ない計算量で⾼速に検出処理できるため、汎⽤性、⼩型軽量化、省エネルギー性にも優れている。
◇今後の展開は?
現在、⼈⼯筋⾁や⼈⼯⽪膚などロボット本体の研究も視野に⼊れた学際的連携体制を構築するとともに、病院や⼯場などでの⾒守りや事故検知といった他分野への適⽤も⾒据え、同施設に加え関連企業などとの連携も図っている。将来的には、聴覚だけでなく、対話機能などを含めた他者の意図や⼼を理解しながら⼈の⽣活を⽀援するサービスロボットの実⽤化を⽬指す。